
Rover V0 Bill of Materials (Click Me!)
- Qty. 1 – Arduino Uno with Ardumoto motor driver
- Qty. 1 – 7.4 V Lithium Battery
- Qty. 1 – XBee transceiver
- Qty. 4 – stepper motors
- Qty. 1 – Sparkfun accelerometer
- Qty. 3 – infrared sensors
- Qty. 1 – 1 kg spool of 3.00 mm Polylatic Acid (PLA) filament
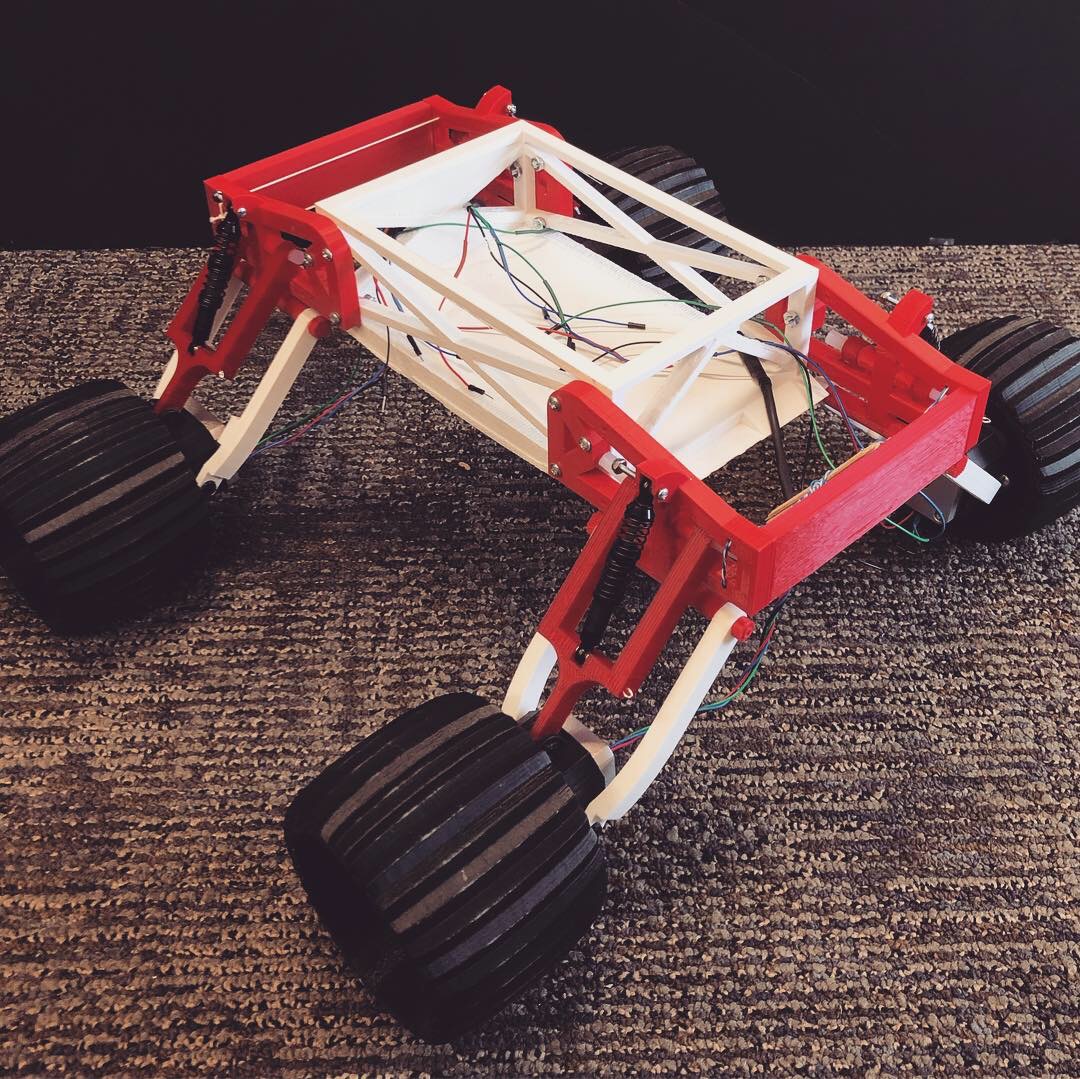
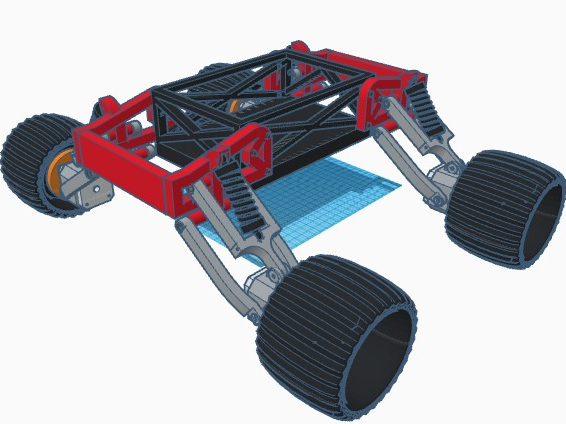
Autonomous Rover V0.0
Utilized Tinkercad to model the entire chassis including suspension system, wheels, control arms, and bolts/nuts that fastened the chassis together. Frame was completely 3D printed on a MakerBot Replicator 3 out of PLA polymer material.
Ultimately, the chassis design came out terrific. For having no experience with GD&T or assemblies at this point, it took quite a few iterations of main parts to get the fit, form, and function under control. Once I established a proper part, I capitalized on duplicative prints by using the symmetry of the overall design.
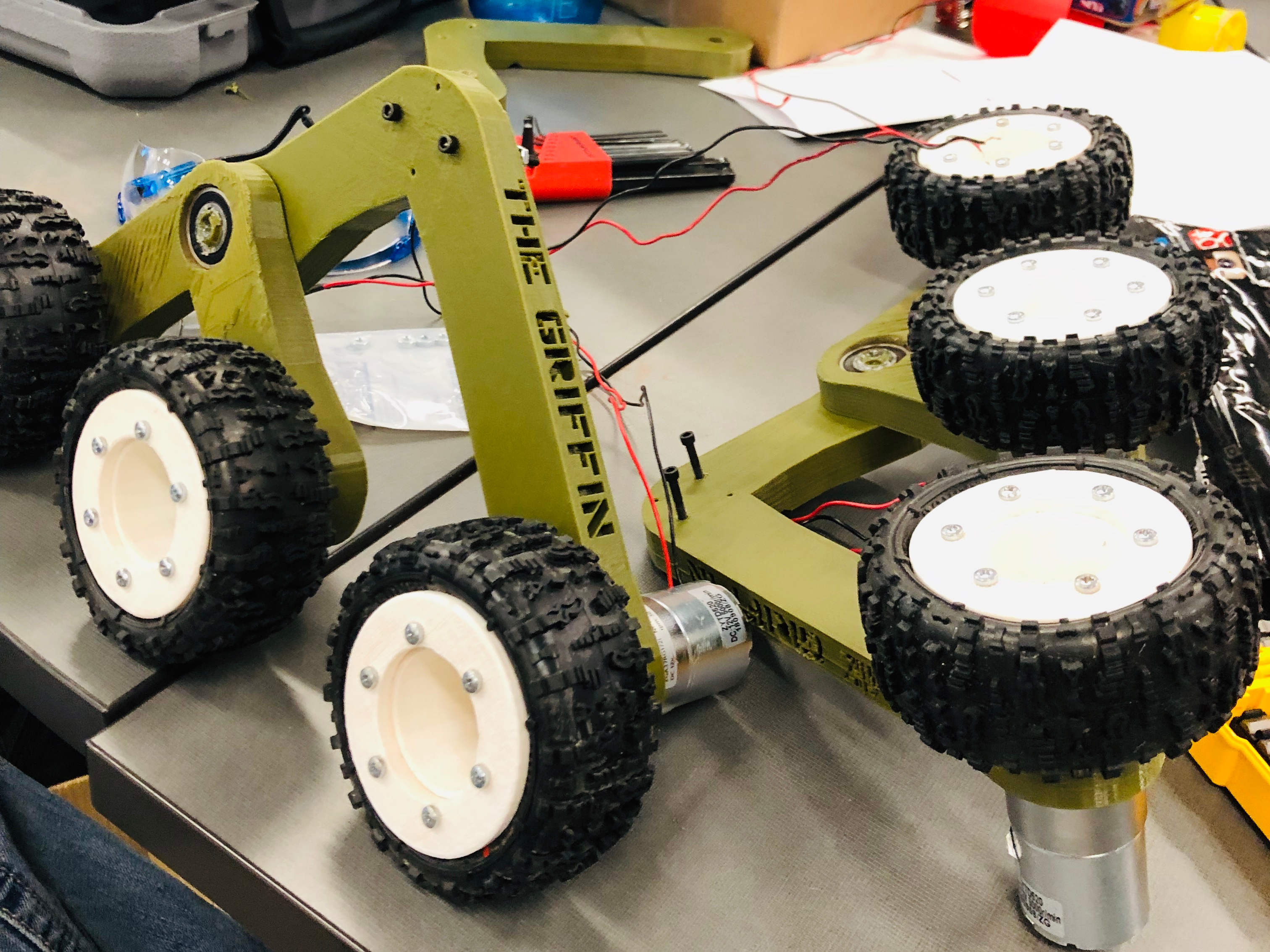
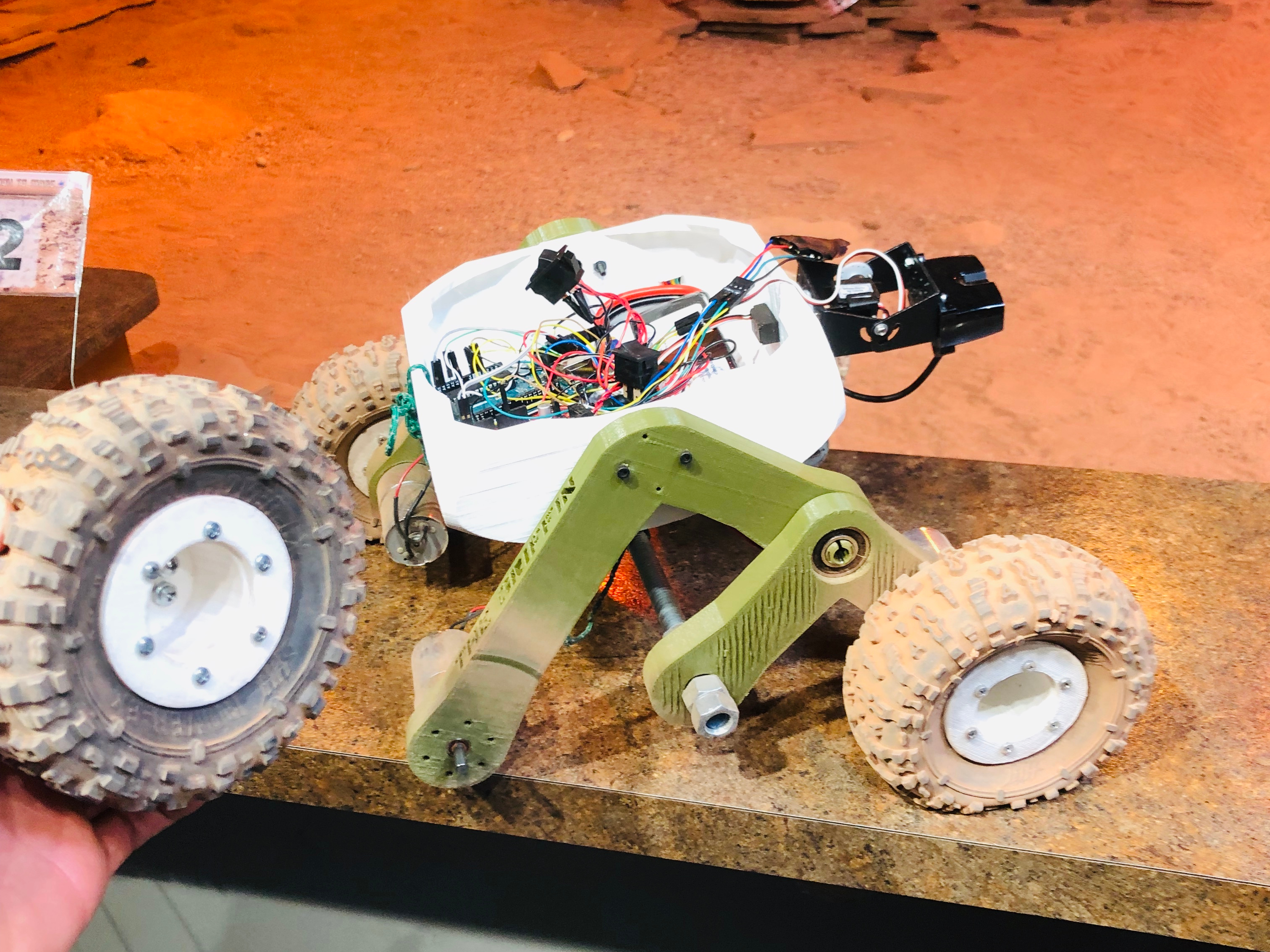
Autonomous Rover V1.0
Second iteration of the autonomous rover challenge through the Colorado Space Grant Consortium. Utilized Tinkercad once again for the body, wheel hubs, and an upgraded rocker-bogey style suspension system, similar to the mars rover designs.
For the electronics, was helped tremendously by my co-lead with integrating not only sonar sensors, but an onboard LiDAR laser imaging system with accompanying dual axis servos to scan the landscape while traversing to the beacon. Another major improvement was the DC brushless motors powered by a 7.4V lithium ion battery, giving this design a much needed makeover with the entire control and driving system.



Rover V1 Bill of Materials (Click Me!)
- Qty. 1 – Arduino Mega with Ardumoto motor driver
- Qty. 1 – 7.4 V Lithium Battery
- Qty. 1 – XBee transceiver
- Qty. 4 – brushless DC motors
- Qty. 1 – Sparkfun Accelerometer
- Qty. 2 – servo actuated LiDAR sensors
- Qty. 1 – 1 kg spool of 3.00 mm Polylatic Acid (PLA) filament
